
|
Bild 1: Prinzipskizze eines Kegelraddifferentials
|
|
Bild 2: Prinzipskizze eines Stirnraddifferentials
|
|
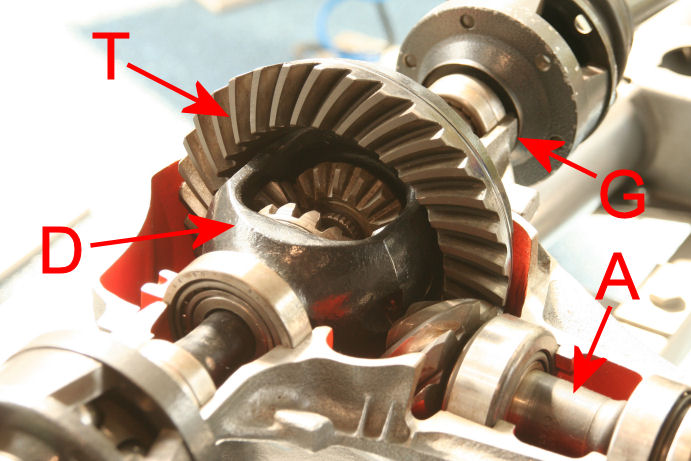
Bild 3: Achsgehäuse mit Differenzial
|
|
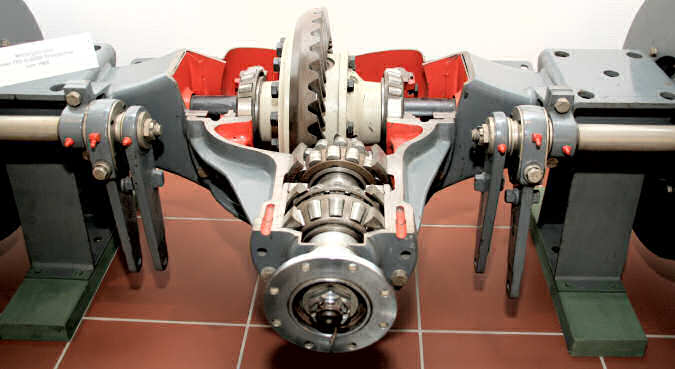 Bild 4: Hinterachse eines Lkw Bild 4: Hinterachse eines Lkw
|
|
Bild 5: Fahrraddifferenzial von E. Whitehead
|
|
Bild 6: Spardifferenzial von M. Tibbets
|
|
Das offene Differenzial
Offenes Differenzial bedeutet, dass dieses Ausgleichsgetriebe nahezu keine Sperrwirkung hat.
Im Alltagsbetrieb ist es völlig unauffällig, da es praktische keinen Einfluss auf die Lenkung
hat. Bemerkbar wird es erst, wenn uns Traktionsprobleme am Vorwärtskommen hindern.
Funktionsweise
Wie bereits angedeutet, ist das Differenzial ein spezielles
Planetengetriebe, bei dem Sonnenrad und Hohlrad gleichgroß sind. Nehmen wir für diese
Erklärung an, dass es sich bei den Differenzialen um Achsdifferenziale eines Fahrzeugs mit
Standardantrieb (Motor vorne, Antrieb hinten) handelt.
Bild 1: Die übliche Bauform für Pkw ist das Kegelraddifferenzial.
Dabei wird der Differenzialkorb (DK) von der Kardanwelle her angetrieben (K). Im
Differenzialkorb (DK) sind die Planetenräder (P) so gelagert (L), dass sie sich frei um ihre
eigene Achse (B) drehen können, aber um die Achse (A) die Bewegung des Differenzialkorbes (DK)
mitmachen müssen. Dabei nehmen sie auch die Seitenräder (S) mit, die wiederum mit den Rädern
des Fahrzeugs (bei R über Gelenkwellen angeschlossen) verbunden sind.
Wenn nun das Fahrzeug in einer Kurve fährt, dreht sich ein Seitenrad (S) etwas schneller als
der Differenzialkorb (DK), das andere dreht sich etwas langsamer als der Differenzialkorb
(DK). Die Planetenräder (P) drehen sich dadurch um ihre eigene Achse (B) übertragen aber
trotzdem noch das Antriebsmoment auf die Räder.
Der Name Kegelraddifferenzial kommt von der Art der Verzahnung. Im Prinzip ist jedes
Zahnrad ein Kegelstumpf, auf dessen Mantelfläche sich die Verzahnung befindet. Bei Kegelrädern
gibt es eine geometrische Bedingung, damit die Verzahnung einwandfrei läuft: Wenn zwei Kegel
aufeinander abrollen sollen, ohne zu rutschen (der im Falle von verzahnten Kegelrädern: zu
klemmen), dann müssen die Spitzen der Kegel sich in einem Punkt treffen (im Bild durch das X
angedeutet).
Bild 2: Das Stirnraddifferenzial sollte man sich vor allem dann
ansehen, wenn man die Funktion von Helical LSD und Torsen B
verstehen möchte. Grundsätzlich muss ein Planetendifferenzial so funktionieren, dass bei
festgehaltenem Differenzialkorb das Drehen des einen Seitenrades zu einem entgegengesetzten
Drehen des anderen Seitenrades bei gleicher Geschwindigkeit führt. Bei Planetengetrieben wird
diese Eigenschaft als Standübersetzung i0 bezeichnet, die in diesem
Falle i0 = -1 ist.
Der wesentliche Unterschied zwischen Stirnrad- und Kegelraddifferenzial ist die Lage der
Achse (B) der Planetenräder (P). Wenn man die Seitenräder über ein Planetenrad verbinden
wollte, wäre die Standübersetzung i0 = +1, so dass die
Planetenräder paarweise eingebaut werden müssen.
Sonst ist eigentlich alles gleich: Die Planetenräder sind im Differenzialkorb (DK) auf ihrer
Drehachse gelagert (L) und werden vom Differenzialkorb mitgenommen und eine Ausgleichsbewegung
der Räder wird über die Planetenradpaare ermöglicht.
Die Bezeichnung Stirnraddifferenzial kommt von der Verzahnung. Im Prinzip ist das Zahnrad
ein Zylinder, auf dessen Mantelfläche sich die Verzahnung befindet.
Bild 3 zeigt ein komplettes Achsgehäuse (ausgestellt im Verkehrszentrum des Deutschen
Museums). Von der Antriebsseite (A) wird das Tellerrad (T) angetrieben, welches seinerseits
fest mit dem Differentialkorb (D) verbunden ist. Auf beiden Seiten des Achsgehäuses werden
Gleichlaufgelenke (G) eingesetzt, die das Differenzial mit den Rädern verbindet.
Bild 4 zeigt eine angetriebene Lkw-Achse (ITO 6/6008 Triebachse) aus dem Jahre 1965,
ausgestellt im Museum "Achse, Rad und Wagen" der Firma BPW. Hier handelt es sich um eine
Starrachse, so dass am Differenzial keine Gleichlaufgelenke angeschlossen werden.
Historische Differenziale
Seit wann gibt es offene Differenziale? Hat Carl Benz das erste eingesetzt, wie es
gelegentlich in der Literatur erwähnt wird? Carl Benz kam mit einem Fahrzeug 1886 auf den
Markt, welches unter anderen Details auch ein Differenzial besaß. Das US- Patentamt hat unter
der Nummer 194980 am 11.09.1877 ein vierrädriges Fahrrad von E. Whitehead mit einem
Differenzial patentiert (Bild 5)
Die früheste Erwähnung, die ich finden konnte, nennt den Pariser Onésiphore Pecqueur
(1792-1852) als Erfinder, er soll es 1827 patentiert haben. Von ihm fand ich in den USA
weitere Patente zur Lederriemenherstellung. Leider sind die US-Patente vor 1837 verbrannt und
weitere französische Patente nicht auffindbar.
Bild 6: Eine andere US-Anmeldung, welche unter der Nr. 1190667 am 11.07.1916 für M.
Tibbets patentiert wurde, zeigt ein geradezu minimalistisches Differenzial und hat
wahrscheinlich schon von Natur aus die Eigenschaften eines Sperrdifferenzials. Die blauen
Flächen zeigen, dass es nur Seitenräder hat, die direkt miteinander kämmen und vom Gehäuse
angetrieben werden. Planetenräder gibt es nicht! Zusätzlich hat das Differenzial eine
mechanische Vollsperre (100%).
Steckbrief offene Differenziale
-
Wenn das Fahrzeug geradeaus fährt, drehen sich die Planetenräder nicht um ihre eigene
Achse und die Zahnräder wälzen nicht aufeinander ab. Der Wirkungsgrad ist in diesem Falle
100%
-
Die Leistung, die über ein Planetengetriebe übertragen werden kann, lässt sich in
gewissen Grenzen dadurch steigern, dass weitere Planetenräder eingebaut werden. Dadurch
ergibt sich eine Leistungsverzweigung. In der Regel wird das Kegelraddifferenzial mit zwei
Planetenrädern bestückt, bei höherer Last werden auch drei oder vier Planetenräder
eingebaut.
-
Wenn man von einem Differential spricht, ist üblicherweise eine Momentenverteilung von
50:50 zwischen den Abtriebsseiten gemeint. Es kann daher höchstens das doppelte
Antriebsmoment dessen übertragen werden, was auf der rutschigeren Seite auf die Straße
gebracht werden kann.